Installation
Diese Anleitung beschreibt die Installation von LibreScoot auf deinem unu Scooter Pro.
Installer-App (empfohlen)
Der Installer ist eine Desktop-App, die dich durch den kompletten Ablauf führt. Sie übernimmt die Firmware-Downloads, das Flashen beider Boards und das Einrichten der Offline-Karten. Du brauchst nur ein USB-Kabel und einen Schraubendreher.
Beta-Software
Der Installer befindet sich in der Beta. Wir haben ihn auf allen Plattformen mit echter Hardware getestet, trotzdem kann etwas schiefgehen. Im schlimmsten Fall ist dein Roller ohne tiefergehenden Eingriff nicht mehr nutzbar. Verwendung auf eigene Gefahr, ohne jegliche Gewährleistung. Für Support versuch's auf Discord, bedenk aber, dass wir alle ehrenamtlich dabei sind.
Was du brauchst
- unu Scooter Pro
- USB-Kabel (Mini-B auf der Roller-Seite)
- PH2-Schraubendreher oder H4-Innensechskant für die Schrauben des Fußraum-Panels
- Etwa 20 Minuten Zeit
Download
Version 0.9.0 (Beta) · Alle Downloads · Alle Releases · Quellcode
Hinweise zum ersten Start
Der macOS-Build ist signiert und notarisiert und startet ohne Warnung. Der Windows-Build ist noch nicht signiert.
- Windows: SmartScreen warnt vor einem unbekannten Entwickler. Auf Weitere Informationen klicken und dann auf Trotzdem ausführen.
- Linux: Bei Bedarf die Binärdatei mit
chmod +xausführbar machen.
Der Installer übernimmt Treiberinstallation, Netzwerk-Setup und Rechte-Eskalation selbst. Unter Linux braucht er Root-Rechte für den USB-Zugriff. Unter macOS fragt er nach deinem Passwort. Unter Windows installiert er automatisch einen USB-Ethernet-Treiber.
Manuelle Installation
Wenn der Installer bei deinem Setup nicht läuft, kannst du beide Boards manuell über einen Serial-Adapter und U-Boot flashen. Das ist aufwendiger: Du brauchst physischen Zugriff auf beide Boards und ihre UART-Debug-Header.
Bevor du anfängst
Die manuelle Installation setzt Erfahrung mit Kommandozeile und seriellen Terminals voraus. Wenn das nichts für dich ist, nimm den Installer oben oder frag auf Discord nach.
Was du brauchst
- unu Scooter Pro (Baujahr 2020 oder neuer)
- 3,3-V-USB-zu-Seriell-Adapter (KEINE 5-V-Variante – sonst gehen die Boards kaputt)
- USB-Kabel (Mini-B auf der Roller-Seite)
- Linux- oder macOS-Rechner
- Serielles Terminal (
screen,minicomo.ä.) - Werkzeug:
- PH2-Kreuz- oder H4-Innensechskantschlüssel für die Schrauben am Fußraum-Panel
- H5-Innensechskant zum Lösen der MDB-Halterung
- Torx T10 für die Schrauben am MDB-Gehäuse
Firmware-Dateien
Lade die .sdimg.gz-Dateien für MDB und DBC von downloads.librescoot.org oder aus den GitHub-Releases. Jedes Release enthält:
.sdimg.gz– komprimiertes Raw-Disk-Image (erforderlich).sdimg.bmap– Block-Map für Sparse-Writes (optional, beschleunigt das Flashen)
Die .mender-Dateien im Release sind für Over-the-Air-Updates auf Rollern, die bereits LibreScoot laufen haben. Für eine Neuinstallation verwendest du sie nicht.
Wenn du bmap nutzen willst (empfohlen – schneller und mit Prüfsummen), lade zusätzlich librescoot-flasher von der Release-Seite. Binaries gibt es für Linux (amd64, arm64, arm), macOS (arm64) und Windows (amd64).
Sicherheit
Zuerst alle Batterien abklemmen
Bevor du irgendetwas absteckst oder das MDB ausbaust, MUSST du alle Batterien in dieser Reihenfolge abklemmen:
- Beide Hauptbatterien aus ihren Slots entnehmen
- Connectivity Battery (CB) abstecken – vorn links im Fußraum
- AUX-Batterie abklemmen – hinten rechts im Fußraum
Wenn du die Batterien nicht abklemmst, kannst du das MDB beschädigen oder elektrische Gefahren verursachen.

Fußraum-Panel (geschlossen)

Fußraum offen

CB-Stecker (abgezogen)
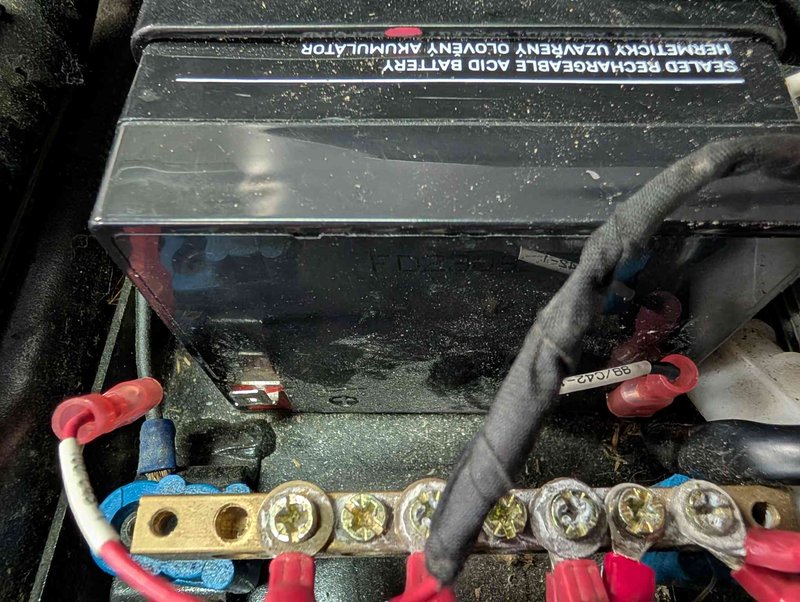
AUX-Batterie (abgeklemmt)
Schritt 1: MDB flashen
MDB ausbauen und öffnen
Fußraum-Abdeckung abnehmen, Batterien abklemmen (siehe oben), dann das MDB aus dem Roller ausbauen (H5-Innensechskant). Das MDB-Gehäuse öffnen (Torx T10), um an den UART-Debug-Header zu kommen.
Serielle Verbindung herstellen und U-Boot unterbrechen
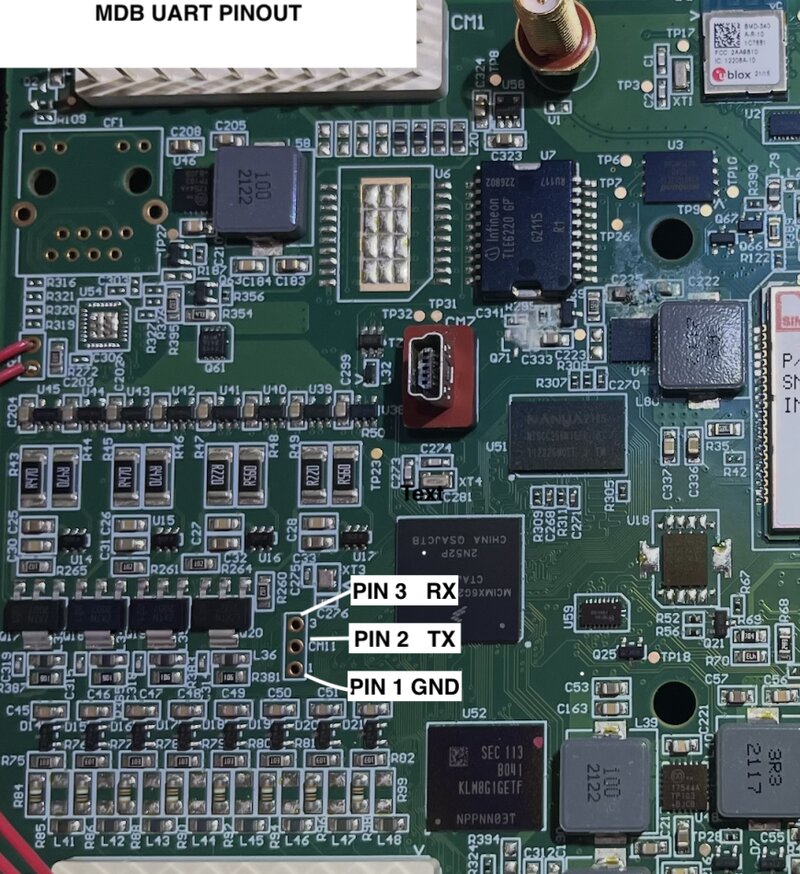
Verbinde deinen 3,3-V-Serial-Adapter mit dem UART-Header des MDB:
| Pin | Signal |
|---|---|
| 1 | GND |
| 2 | TX (MDB sendet) |
| 3 | RX (MDB empfängt) |
Öffne ein serielles Terminal mit 115200 Baud, 8N1, ohne Flusskontrolle:
screen /dev/ttyUSB0 115200
Schalte das MDB ein und drücke mehrfach die Leertaste, um den Boot zu unterbrechen und an den U-Boot-Prompt zu kommen.
USB-Mass-Storage-Modus aktivieren
Am U-Boot-Prompt den eMMC als USB-Speichergerät exponieren:
ums 0 mmc 1
Verbinde deinen Laptop mit dem Mini-B-USB-Port des MDB. Der eMMC taucht auf deinem Rechner als Block-Device auf (z.B. /dev/sdX). Mit lsblk findest du heraus, welches es ist – es sollte etwa 7,3 GB groß sein.

Firmware flashen
Mit librescoot-flasher (empfohlen – unterstützt bmap-Sparse-Writes mit Prüfsummen pro Block):
# Mit bmap (schneller, mit Prüfsummen): sudo ./librescoot-flasher \ --image librescoot-unu-mdb-*.sdimg.gz \ --bmap librescoot-unu-mdb-*.sdimg.bmap \ --device /dev/sdX # Ohne bmap: sudo ./librescoot-flasher \ --image librescoot-unu-mdb-*.sdimg.gz \ --device /dev/sdX
Mit dd (Fallback):
gunzip -c librescoot-unu-mdb-*.sdimg.gz \ | sudo dd bs=4M of=/dev/sdX oflag=direct sudo sync
Prüf das Ziel-Device doppelt. Wenn du auf das falsche /dev/sdX schreibst, sind die Daten auf dem Laufwerk weg.
Schritt 2: DBC flashen
Das DBC (Dashboard Computer) muss ebenfalls geflasht werden. Sein UART-Header ist von unten zugänglich, direkt neben den Hauptsteckern – du musst das Gehäuse nicht öffnen.
Serielle Verbindung zum DBC
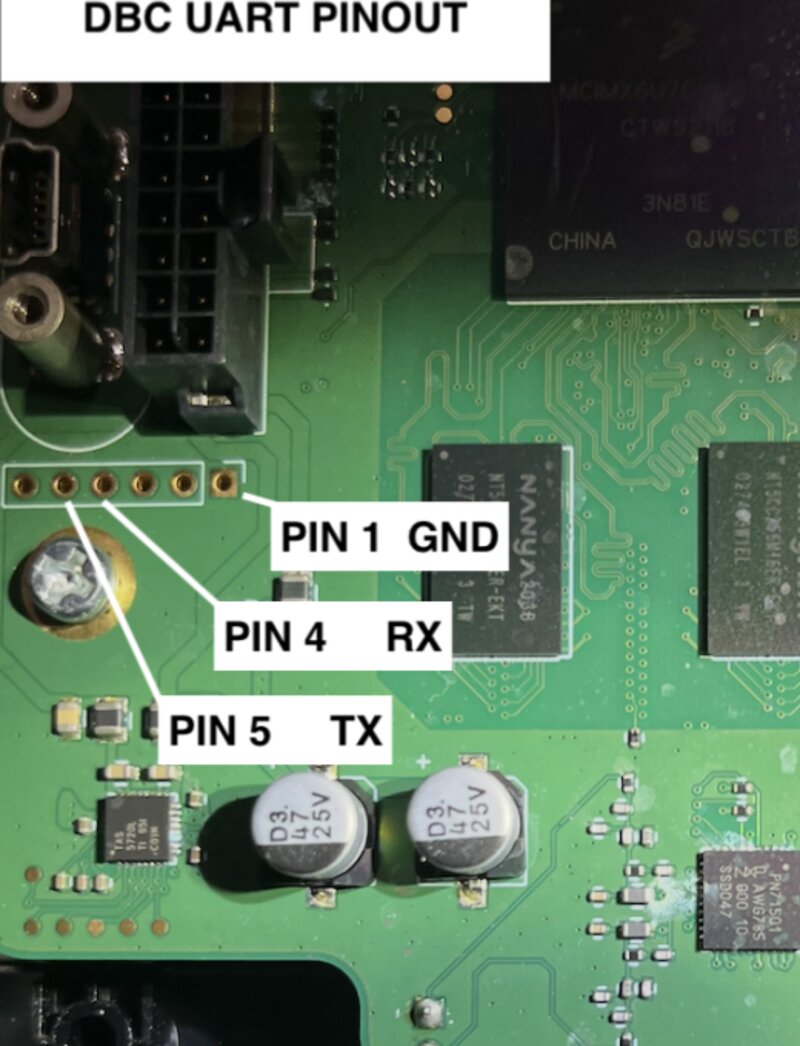
Das DBC hat einen 6-poligen UART-Header (von unten zugänglich, neben den Hauptsteckern). Pin 1 ist das quadratische Pad:
| Pin | Signal |
|---|---|
| 1 (quadratisch) | GND |
| 2 | — |
| 3 | — |
| 4 | RX (DBC empfängt) |
| 5 | TX (DBC sendet) |
| 6 | — |
Wenn du keine Ausgabe bekommst, tausche Pins 4 und 5. Einstellungen wie beim MDB: 115200 Baud, 8N1, 3,3 V. Das DBC kann über seinen Mini-USB-Anschluss oder über den 16-poligen Stecker versorgt werden. Einschalten und Leertaste drücken, um U-Boot zu unterbrechen.
USB-Mass-Storage-Modus aktivieren
Am U-Boot-Prompt:
ums 0 mmc 2
Achtung: Das DBC nutzt mmc 2, nicht mmc 1.
DBC-Firmware flashen
Gleicher Ablauf wie beim MDB, nur mit den DBC-Image-Dateien:
sudo ./librescoot-flasher \ --image librescoot-unu-dbc-*.sdimg.gz \ --bmap librescoot-unu-dbc-*.sdimg.bmap \ --device /dev/sdX
Oder mit dd:
gunzip -c librescoot-unu-dbc-*.sdimg.gz \ | sudo dd bs=4M of=/dev/sdX oflag=direct sudo sync
Schritt 3: Zusammenbau und erster Start
Baue beide Boards wieder ein, schließe alle Batterien in umgekehrter Reihenfolge an (zuerst AUX, dann CB, dann die Hauptbatterien) und schalte den Roller ein.
Auf dem Dashboard sollte die LibreScoot-Boot-Animation erscheinen. Nach dem Boot kannst du dich per USB-Ethernet (ssh root@192.168.7.1) oder seriell einloggen und prüfen:
lsc status
Zurück zur Originalfirmware
Die Installation sichert deine Originalfirmware nicht. Wenn du zurückwechseln willst, kannst du die Original-Images auf demselben Weg zurückflashen. Details auf Discord.
Nach der Installation
Update-Kanal setzen
Kanäle wechselst du mit der lsc-CLI. stable ist der empfohlene Kanal; testing bietet frühen Zugriff auf neue Funktionen, nightly ist für Entwickler*innen.
lsc ota channel stable # oder: testing, nightly lsc ota check # Nach Updates suchen
Keycards registrieren
Bei einer frischen Installation ohne registrierte Keycards startet der Keycard-Service im Auto-Learn-Modus. Die erste Karte, die du auflegst, wird zur Master-Keycard. Danach hältst du die Master-Karte an den Leser, um den Teach-In-Modus zu starten, und legst anschließend neue Karten auf, um sie zu registrieren. Du kannst Keycards auch manuell per UID hinzufügen:
lsc keycard add 04:2A:3D:6A:0D:65:80
Offline-Karten installieren
Für Offline-Navigation lädst du Kartenkacheln und Routing-Daten für deine Region von downloads.librescoot.org und kopierst sie auf das DBC. Details siehe Offline-Navigation.
Fehlersuche
- Keine serielle Ausgabe – prüfen, ob TX/RX nicht vertauscht sind (MDB und DBC haben unterschiedliche Pinbelegungen), Baudrate (115200) checken, 3,3 V des Adapters bestätigen
- U-Boot lässt sich nicht unterbrechen – bereits vor dem Einschalten mit dem Drücken der Leertaste anfangen, schnell und wiederholt drücken
- eMMC erscheint nicht als USB-Gerät – Mini-B-Kabel prüfen, anderen USB-Port am Rechner probieren
- Dashboard startet nach dem Zusammenbau nicht – USB-Verbindung DBC↔MDB prüfen, Reihenfolge beim Anschließen der Batterien kontrollieren
- OTA-Updates schlagen nach der Installation fehl – Modem-Konnektivität mit
lsc statusprüfen
Für weitere Hilfe komm in die Discord-Community.